多线程
我们将介绍两种模式:
- IOServicePool --> 启动多个线程,每个线程管理一个 io_context
- IOThreadPool --> 只启动一个 io_context,被多个线程共享
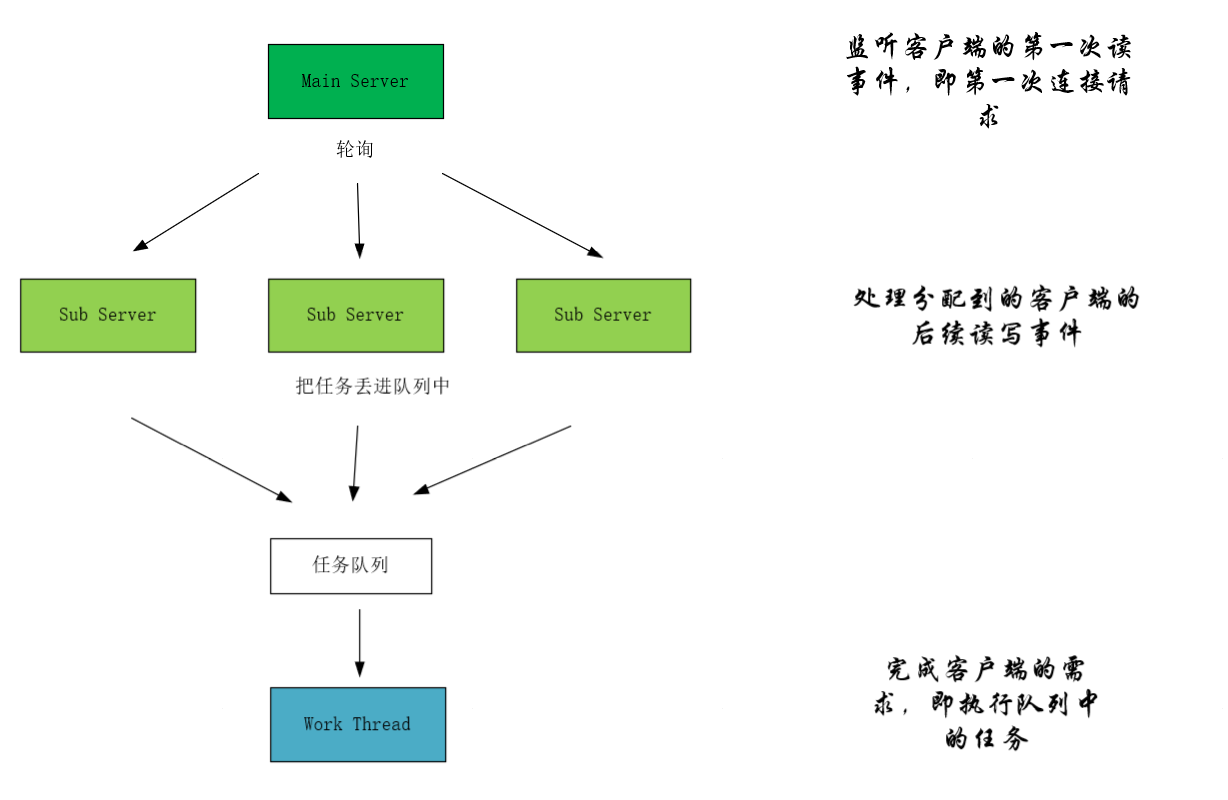
IOServicePool
早前的单线程模式中,我们的主线程不仅要监听客户端的连接,同时还要继续监听该客户端后续的读写事件。尽管我们已经把客户端需要的服务交互给工作线程,达到网络和计算工作的解耦,但是在接下来的多线程中,还可以继续解耦。即让主线程继续监听客户端的连接,但是后续这些连接的读写事件讲交给其他的线程处理。
- 每一个 io_context 跑在不同的线程里,所以同一个 socket 会被注册在同一个 io_context 里,它的回调函数也会被单独的一个线程回调,那么对于同一个 socket,他的回调函数每次触发都是在同一个线程里,就不会有线程安全问题,网络 IO 层面上的并发是线程安全的
- 对于不同的 socket,回调函数的触发可能是同一个线程(两个 socket 被分配到同一个 io_context),也可能不是同一个线程(两个socket被分配到不同的io_context里)。所以如果两个 socket 对应的上层逻辑处理,如果有交互或者访问共享区,会存在线程安全问题。比如 socket1 代表玩家 1,socket2 代表玩家 2,玩家 1 和玩家 2 在逻辑层存在交互,比如两个玩家都在做工会任务,他们属于同一个工会,工会积分的增加就是共享区的数据,需要保证线程安全。可以通过加锁或者逻辑队列的方式解决安全问题,我们目前采取了后者
这里面有个内容值得一提,即 boost::asio::io_context::work
。我们调用 boost::asio::io_context 的 run 方法之后进入
事件循环。根据官方文档, 在已经启动 io_context::run()
的情况下, 如果此时没有了 IO 操作, 那么 io_context
会自动取消事件循环, 那么此时如果再有异步 IO 回调, 也不会发生作用了。
1 | |
但是有些情况下, 我们希望 run() 函数的事件循环在没有 IO
事件的情况下, 也不会退出事件循环, 而是一直等待, 当有了新的异步 IO
调用的时候, 还可以继续使用该循环。io_context::work
就可以办到,就是防止 io_context 在没有 IO
的情况下依旧能够运行。直到你调用 它的 reset 方法销毁 work
对象才会停止发挥作用。
用法也相当简单,只需要把对应 io_context 传递给 work 作为参数,就代表让 该 work 管理了。
比方说我们的核心代码如下:
1 | |
有新连接到来就会轮询分配 IOService。
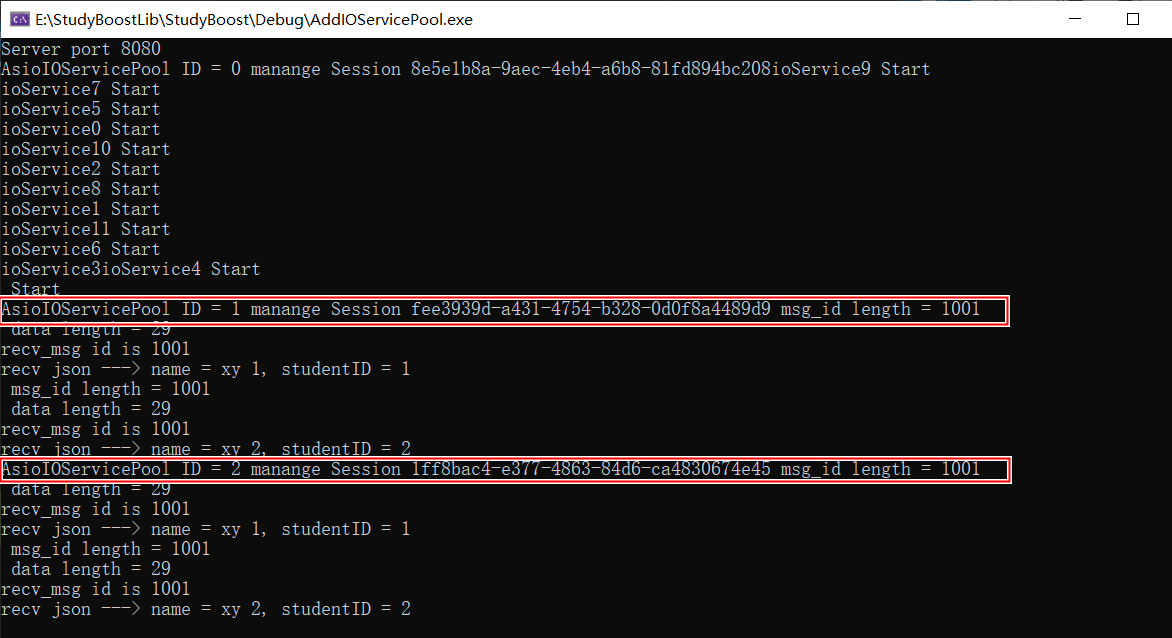
代码地址:增加IOServicePool
IOThreadPool
1 | |
我们的代码不是基于前一个多线程代码来修改的,而是基于上一章的 LogicalDesign。
我首先疑惑的是为什么多个线程可以多次启动 io_context,这当然是不了解 Asio 底层原理所致,也打算在第七章或者终章记录任何有关 Asio 库的相关问题。
boost::asio::io_context
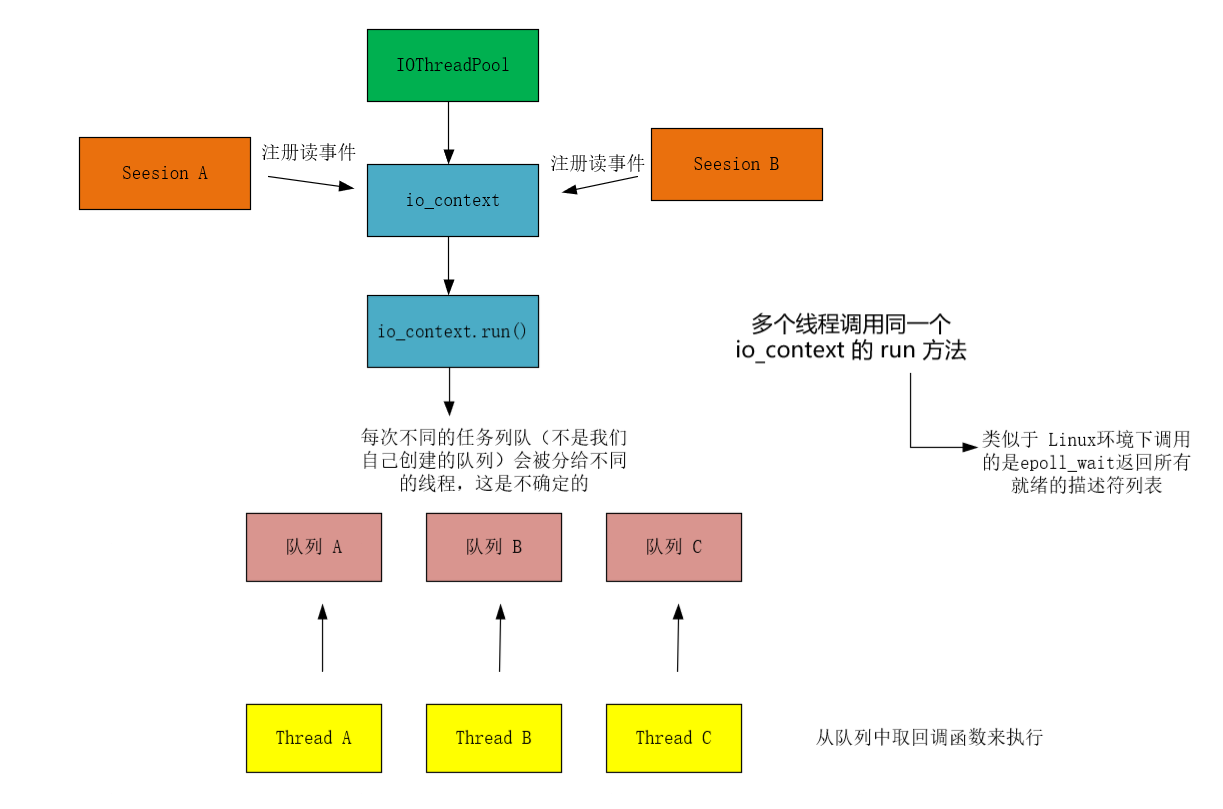
是设计为线程安全的,并支持多个线程并发调用其 run()
方法。这是通过内部同步机制实现的,确保同一时刻只有一个线程处理某个具体任务,但多个线程可以同时调度任务。
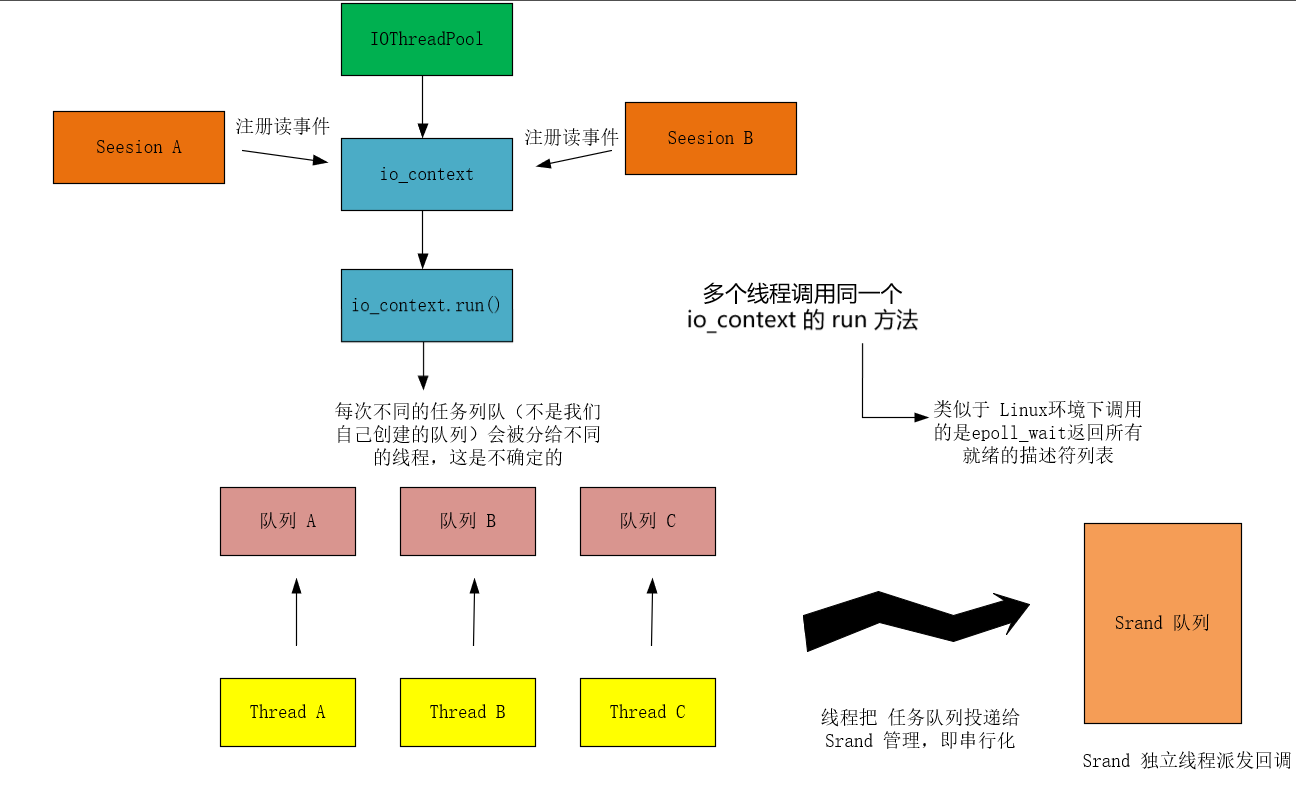
如下图所示,每个线程内部已经调用 run 方法,它是一个阻塞调用,直到所有挂起的异步操作都完成或被显式地停止。在处理完所有操作后,它会返回。但是我没已经用 work 帮我们让它始终不会停止,除非我们手动 reset。run 之后会开始处理所有已注册的异步操作,那么多线程都等待者异步事件到来,即等待被分配任务队列,然后去执行回调函数。
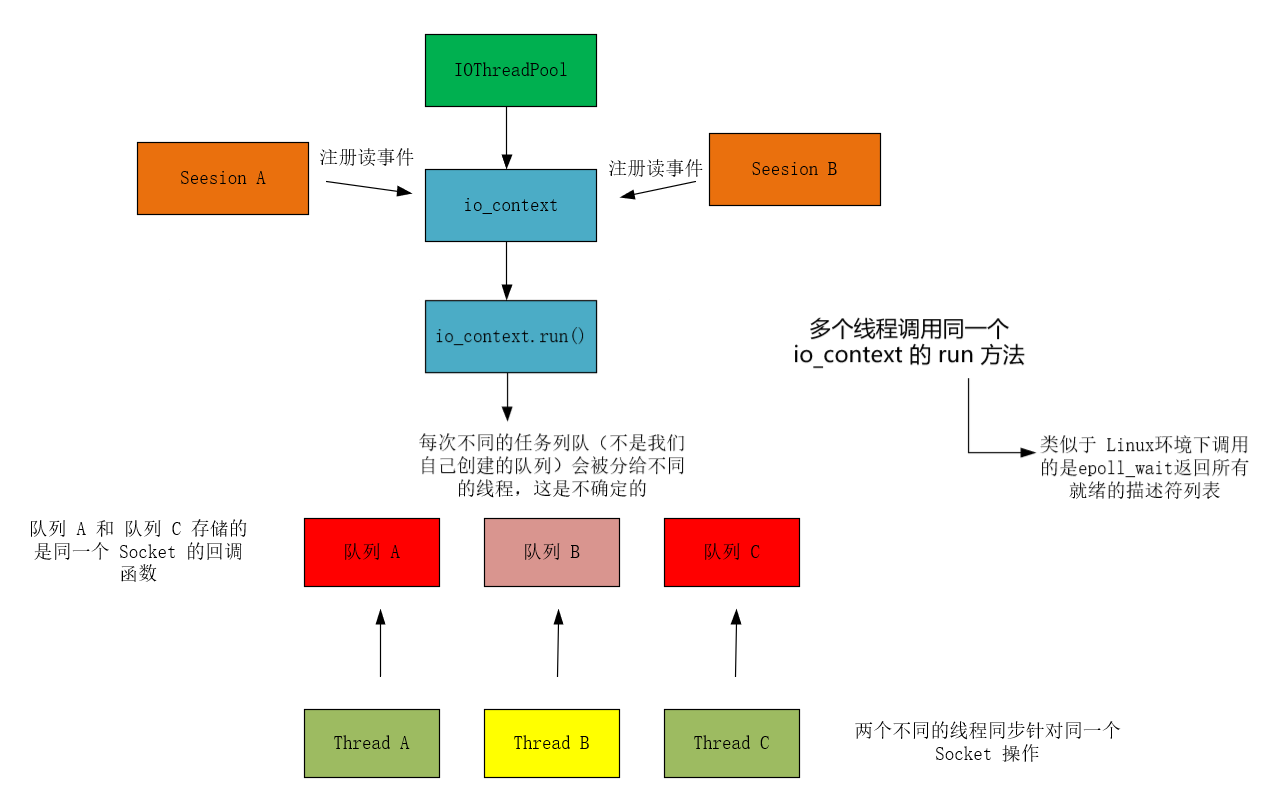
即便如此,还是存在一个隐患,即同一个 Socket 的多个事件被分配到多个线程中(每个线程只得到一个事件,即回调函数),那么同一个 Socket 是共享数据区域的,那么多个线程同时对这块区域进行操作就会有问题了。比如第一次是在线程 A,第二次是在线程 C,如果这两次触发间隔时间不大,那么很可能出现不同线程并发访问数据的情况,比如在处理读事件时,第一次回调触发后我们从 Socket 的接收缓冲区读数据出来,第二次回调触发,还是从 Socket 的接收缓冲区读数据,就会造成两个线程同时从 Socket 中读数据的情况,会造成数据混乱。
如果需要多个线程访问共享资源,你可以使用
boost::asio::strand
来串行化这些任务,确保某些任务只能由一个线程排他性地处理。strand
的目的是保证一系列操作是按照顺序执行的,即使它们分布在不同的线程中。
创建 strand 对象
1 | |
boost::asio::bind_executor:将执行器与回调函数完全绑定在一起
1 | |
绑定 strand 之后,绑定的函数就会有 strand
来调用,就不会有前面讲的并发安全问题。我们需要在所有收发的地方,都将调度器绑定为strand_,这边是集中在
Session类 中。Server类
中尽管也有,但是它是工作在单线程的,不存在并发问题。
代码地址:增加IOThreadPool
性能比较
把两端的输入全部移除,压力测试不要有任何输出。我这边 10万并发量 需要 15s (IOThreadPool 和 IOSerivcePool都是一样),这当然取决于你的机器。
⭐️内容取自 B 站 UP 恋恋风辰和 mmoaay 的《Boost.Asio C++ 网络编程》,仅从中取出个人以为需要纪录的内容。不追求内容的完整性,却也不会丢失所记内容的逻辑性。如果需要了解细致,建议看原视频或者读原书。
