条件变量的正确使用方法
这里只介绍 wait,至于其他如 wait_for和 wait_until 自己查阅即可,无外乎增加一些新的功能而已。wait 提供两种方式:无条件等待和有条件等待
1 | |
无条件等待只有在唤醒的情况下才会解除阻塞,否则一直阻塞。阻塞期间释放锁(即不占有锁),被唤醒就会重新获取锁,解除阻塞往下执行。
有条件等待在阻塞前会判断谓词 pred,如果为 true
就不会阻塞,如果为false
就会阻塞。当条件变量被通知时,线程会尝试重新获取锁,然后再次评估谓词。如果谓词返回
true,线程继续执行;否则,它会再次阻塞。
总的来说无条件等待一上来就会阻塞,直到被唤醒,唤醒就会立即解除阻塞。有条件等待不会立即阻塞,而是先判断谓词情况。也可以说不会立即解除阻塞,要先判断谓词情况。如果为 true 就不阻塞而往下执行,否则就会阻塞。直到下一次被唤醒,再次检测谓词情况,如果为 true 就不阻塞而往下执行,否则就会阻塞。如此反复。
1 | |
通常条件变量被唤醒,需要配合一个判断条件。当这个条件不满足时,线程应该会再次阻塞。如果条件满足则不会阻塞。
为了对这段描述有清晰的认识,还是有必要看看如果不这么做会有什么不恰当的现象。
1 | |
创建一个线程 t1 并执行线程函数 func,等待被外部线程唤醒并输出 share 的值。主线程中循环 自增share,如果share 等于 18 就唤醒其它线程。执行该程序情况如下:
线程中还没有执行 wait 等待被唤醒,主线程这边已经满足 share 等于 18 的条件就执行唤醒操作,我们的线程 t1 就错过被唤醒的机会了,所以会一直阻塞。因为代码中 t1.join 代表 等待线程 t1 结束,否则阻塞。
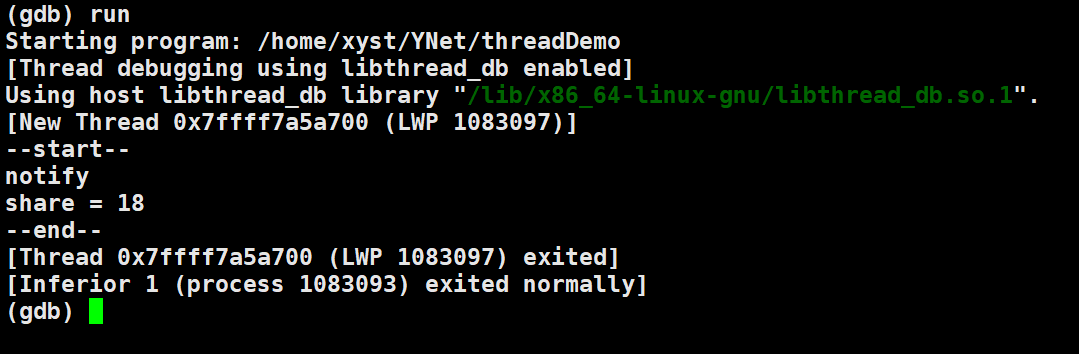
修改代码(while循环前面添加 sleep(3) 休眠三秒),让主线程必然在子线程 t1 执行到 wait 阻塞操作后 才执行 share 的自加操作并唤醒。
尽管已经解决这个问题,但是这种处理方式相当愚蠢,因为不可能在我们的代码中随意加入 sleep 这样的睡眠函数,如何设置恰当的时间?这个地方如果频繁执行,效率影响是否严重?最恰当的还是能够在合适的时候通知并必然能够接受到通知。
这就是前面所讲通常条件变量被唤醒,需要配合一个判断条件。
1 | |
先看现象是否合理:
我们有 t1.join 操作保证主线程不会先于子线程退出,所以子线程有可能会接收到主线程的唤醒。但如果我们继续添加一个变量来让 子线程中的 wait 操作不断检测 条件是否满足(isSuccess 是否为 true),并且主线程唤醒之前 提前把 isSuccess 设置为true 再进行唤醒。哪怕最后这个唤醒失效,也必然能保证线程 1 能正常获取 share 的值并安全退出。因为你从图中可以看到 主线程提前唤醒,我的子线程都还没有准备好,即子线程还没有执行到 wait 阻塞等待。可即便如此,由于在唤醒之前,isSuccess必然已经被 设置为 true。等到子线程真的执行到 wait 阻塞等待时,发现 阻塞条件居然已经满足(isSuccess 检测到为true),子线程就知道主线程已经通知过,只不过这边没有收到而已,share明显已经可以被获取(因为子线程希望share = 18的时候被接收)。
到这个时候我们终于弄明白,条件变量被唤醒,需要配合一个判断条件(往往是bool值)是为了避免唤醒被错过而加的一层保护机制。
最后有个条件变量中的虚假唤醒没有讲,这已经在我的另一篇文章中讨论,感兴趣的可以去阅读:多线程中的虚假唤醒
结合前面的讨论和另一篇虚假唤醒的讨论,我们对使用条件变量的人提出如下要求,即你必须谨记下面的这两句:
- 判断条件是否满足使用while,不可以用if
- 务必添加变量来保证等待线程不会错过其他线程发送的唤醒信号
锁的选择
C++11提供四种语义的互斥量:独占互斥量std::mutex,带超时的独占互斥量std::timed_mutex,递归互斥量std::recursive_mutex,带超时的递归互斥量std::recursive_timed_mutex。应该优先选择std::mutex,因为它满足我们所有的需要使用互斥的场景。
对于 mutex 的关键两个操作是 lock 和 unlock,将需要保护的临界区用这两个方法包裹即可。C++11为了方便锁的使用,提供 std::lock_guard 和 unique_lock 给我们使用:
std::lock_guard:只是对操作系统锁的API进行RAII的封装,构造时获得锁(加锁),析构时释放锁(解锁),并不提供额外的方法,也不提供
lock 和 unlock 方法。
unique_lock:它除了对操作系统锁的API进行RAII的封装,还提供手动控制锁的方法,即
lock 和 unlock 方法。并且提供给多的 lock 策略,比如
try_lock,try_lock_until等。
生产者-消费者队列
生产者-消费者队列简介
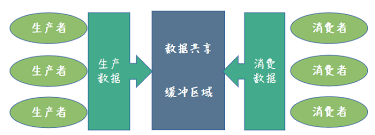
它是实现线程间协作,交互的一种重要手段。从一端放数据(生产者),从另一端取数据(消费者)。生产者和消费者可以有一个或多个。
- 队列作为临界区需要被保护,消费者与生产者间要互斥
- 当有多个生产者或多个消费者时,生产者之间,消费者之间需要互斥
- 生产者在队列满的时候,不能再往队列中放入数据
- 消费者在队列空的时候,不能再从队列中取数据
在用途这个方向的划分,对于队列的实现,没有太大区别。只是队列中放的数据类型不一样。一种是业务的数据,一种是可调用的对象。但是有界队列和无界队列恰恰相反,在队列的实现方式上是有很大的不同,也是后面会用代码实现的内容。
(一)按用途将队列分为两类
数据分发的队列
队列中存放的业务数据,可以有一个或多个生产者,消费者线程。生产者线程产生不同类型的数据,通过队列分发给不同消费者线程。
任务队列
队列中存放的是可调用对象,可以有一个或多个生产者,消费者线程
- 在调用要求时序的情况下,应该只有一个生产者和一个消费者线程,一个队列。时序的要求由队列的先进先出的特性保证
- 在调用不要求时序的情况下,则可以有多个生产者,消费者线程
通过任务队列,来实现异步调用。发起业务操作的线程不会被阻塞,业务执行函数被放到另外一个线程执行,比如释放过程耗时高的资源且释放操作不能并发进行时。可以将释放操作专门放到一个线程中去做,此时可以有多个生产者线程,一个消费者线程,生产者将需要释放的资源对象放入队列,消费者线程依次取出后进行释放操作。此时就需要队列来实现异步操作。
(二)根据队列的容量划分
有界队列
容量有大小限制,当满了后,生产者线程需要等待,为空的时候,消费者线程需要等待。这种队列可以用于数据分发的场景,但不能用于异步调用(异步调用的特性是生产者调用能马上返回,所以如果生产者阻塞在等待容器空闲显然是不满足要求的)。
无界队列
容量大小无限制,生产者线程可以一直放数据,队列为空的时候,消费者线程需要等待。这种队列即可以用于数据分发,也可以用于异步操作。这种情况下,消费者线程数量要大于生产者线程,是让数据或任务及时被处理,避免堆积。
生产者-消费者队列(有界队列)
1 | |
生产者-消费者队列(无界队列)
1 | |
异步操作
future 与 promise
它提供了一种机制可以获取异步操作的结果,因为一个异步操作的结果不能马上获取,只能在未来某个时候从某个地方获取。这个异步操作的结果是一个未来的期待值,所有称为 future,可以称它为未来量。
std::future 通常结合 std::promise,std::package_task,std::async使用。因为 future 本身只是用来存储某个结果,所以实际代码的执行还是需要借助其它函数。获取 future 存储结果的方法是 get(),并且只能获取一次,再次获取会异常。
1 | |
std::promise 是一个协助线程赋值的类,它能够将数据和 future 对象绑定起来,为获取线程函数中的某个值提供便利。std::future 通常结合 std::promise 就相当于给线程间建立一个通道,分为以下几步:
- 在主线程中创建一个 std::promise 对象,promise
count_value - 将 count_value 传给线程 t1
- 线程 t1 使用 std::promise 对象 count_value 的 get_future 方法获得一个 std::future对象,因为前面说过 std::future对象 可以存储异步操作的结果。截止到这个时候,通道已经建立,就可以使用通道了
- 在主线程中调用调用std::promise 对象 count_value 的 get 方法,如果 count_value 没有被设置只,主线程就会一直阻塞
- 在子线程中调用 set_value 方法给 count_value 设置一个值
1 | |
future 与 package_task
packaged_task
包装了一个可调用对象,并允许其结果以异步方式获取。它类似于
std::function,但会将结果自动传递给一个
future 对象。它的内部包含两个元素:
- 存储的任务(用户传递),这是某种可调用对象(如函数指针、成员函数指针或函数对象)
- 共享状态(自动传递),能够存储调用存储任务的结果(类型为
Ret),并通过future异步访问
通过调用成员函数 get_future,共享状态与
future 对象关联。调用后,这两个对象共享相同的共享状态。
比方说下面的代码中,先把普通函数 thr_func 包装成 packaged_task 类型的对象(返回值类型和参数列表要一直) task,最终的得到的这个 task 需要通过引用的方式传递到子线程内部,这样才能在主线程的最后通过任务对象的 get_future 方法得到 future 对象,打包的 task 代码中 return 的返回值就存储在 future 对象里。前面我们讲过 future 对象 获取存储结果的方式就是 get 方法。
1 | |
future 与 async
可以直接启动一个子线程并在这个子线程中执行对应的任务函数,异步任务执行完成返回的结果也是存储到一个future对象中。也就是说调用 async 的返回值是一个 future 对象,里面存储返回值。这么看要比 package_task 方便很多,因为不需要取打包可调用对象,直接传递进去即可。
1 | |
函数参数:
- f:可调用对象,这个对象在子线程中被作为任务函数使用
- Args:传递给 f 的参数(实参)
- policy:可调用对象f的执行策略(std::launch::async 创建新线程启动函数,std::launch::deferred 在主线程中启动函数)
1 | |
std::funture
只支持移动语义,它要求类型参数也支持移动语义。它的get方法只能调用 1
次,调用get相当于将结果移走(移动语义的通俗意义)。再次调用会抛异常。
std:shared_future
可以共享结果,可以多次调用get方法,它要求类型参数支持复制语义。
总结
- future 是异步函数存储结果的所在
- promise 异步函数相当于创建一个变量给到线程,然后在线程中把值存储到变量中之后,主线程再进行获取
- packaged_task 异步函数对函数进行封装,这样线程函数可以有 return 返回值,不像 promise 是将在线程函数中把值存储起来,但是 packaged_task 却可以有 return 返回值
- async 异步函数更加高级,前面需要的两个线程函数需要创建子线程,但是它自动创建并且返回传递可调用对象的返回值
future 存储结果,其它三个异步函数中 async 要更灵活且简单,能够真正做到异步(可以自启动一个线程去执行函数)
